
Rumah / Berita / Berita Industri / Motor Apa yang Digunakan dalam Sistem AGV dan Bagaimana Cara Memilih Motor Penggerak AGV yang Tepat?

 bahasa
bahasa
Industri aplikasi
Agv
Robot otomatis

pemotongan laser

Penyortiran logistik

Stasiun daya fotovoltaik

Alat kesehatan
Motor Apa yang Digunakan dalam Sistem AGV dan Bagaimana Cara Memilih Motor Penggerak AGV yang Tepat?
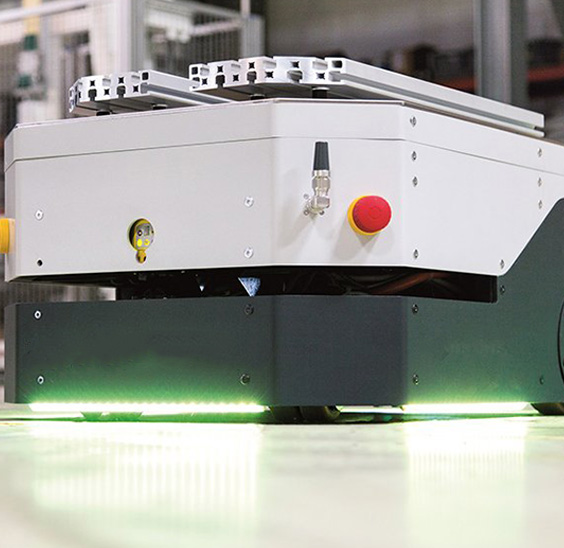
Motor penggerak adalah komponen elektromekanis paling penting dalam Autonomous Guided Vehicle (AGV). Ini menentukan bagaimana AGV berakselerasi, seberapa tepat posisinya, berapa banyak muatan yang dapat dipindahkan, berapa lama baterainya bertahan di antara pengisian daya, dan berapa lama kendaraan beroperasi sebelum sistem penggerak memerlukan perawatan. AGV dengan motor penggerak yang kurang bertenaga atau salah spesifikasi tidak dapat memenuhi persyaratan muatan dan kecepatan dalam produksi; kendaraan dengan efisiensi motor yang buruk menghabiskan baterai lebih cepat daripada yang dapat ditampung oleh operasi logistik; sistem dengan motor penggerak yang memerlukan perawatan sering menciptakan waktu henti yang tidak direncanakan dalam sistem yang seluruh proposisi nilainya adalah operasi otonom yang andal dan berkelanjutan.
Untuk integrator sistem AGV, insinyur robotik yang menentukan komponen penggerak, tim otomatisasi gudang yang mengevaluasi platform AGV, dan pengembang peralatan OEM merancang kendaraan AGV baru, memahami teknologi motor yang digunakan dalam sistem penggerak AGV — dan parameter spesifikasi yang menentukan teknologi mana yang sesuai dengan aplikasi mana — merupakan pengetahuan penting untuk membuat keputusan komponen yang tepat. Panduan ini mencakup jenis motor penggerak AGV, parameter pemilihan, dan persyaratan khusus yang membedakan aplikasi motor AGV dari aplikasi motor industri umum.
Mengapa Persyaratan Motor Penggerak AGV Berbeda dengan Persyaratan Motor Industri Umum
Motor penggerak AGV beroperasi dalam kondisi yang menuntut dan berbeda yang membedakannya dari sebagian besar aplikasi motor industri umum:
Catu daya baterai. Semua AGV bertenaga baterai — beroperasi dari baterai DC (biasanya nominal 24V, 36V, atau 48V) tanpa sambungan ke daya listrik AC. Hal ini pada dasarnya membutuhkan motor penggerak yang kompatibel dengan DC. Motor AC dapat digunakan dengan inverter onboard, namun kerugian efisiensi inversi DC-ke-AC dalam sistem bertenaga baterai cukup signifikan. Motor DC — dan khususnya motor BLDC — merupakan pilihan dominan karena menerima daya baterai secara langsung (atau melalui konverter DC-DC) tanpa penalti inversi.
Siklus start-stop yang sering. AGV berakselerasi dari kecepatan diam hingga kecepatan perjalanan, menavigasi ke titik pengambilan atau penyimpanan, dan berhenti — berulang kali, ratusan atau ribuan kali per hari. Motor penggerak harus menangani siklus start-stop ini tanpa mengalami panas berlebih atau keausan berlebihan, sehingga menuntut manajemen termal motor dan, untuk motor sikat, komutator dan rakitan sikat yang menangani transien start arus tinggi.
Operasi dua arah. AGV harus melaju maju dan mundur — dan harus bertransisi antar arah dengan mulus tanpa guncangan mekanis. Motor dan pengontrolnya harus mendukung kontrol kecepatan dua arah yang mulus. Untuk AGV diferensial kemudi (di mana kontrol kecepatan roda independen di kiri dan kanan menghasilkan putaran), kedua motor penggerak harus disesuaikan secara tepat dalam respons torsi kecepatannya untuk kemudi yang akurat.
Kontrol kecepatan dan posisi yang tepat. Akurasi navigasi pada AGV modern — khususnya AGV berpemandu laser (LiDAR), berpemandu penglihatan, atau jalur magnetis — memerlukan kontrol kecepatan yang tepat dan, dalam beberapa sistem, umpan balik posisi yang tepat dari encoder motor penggerak. Motor harus beroperasi pada kecepatan yang konsisten dan terkendali di seluruh muatan dan jangkauan medannya tanpa perburuan kecepatan atau ketidakstabilan.
Efisiensi tinggi untuk masa pakai baterai. Pada kendaraan otonom bertenaga baterai, efisiensi motor secara langsung menentukan waktu pengoperasian antar pengisian daya. Sistem motor penggerak yang beroperasi pada efisiensi 85%, bukan 75%, memperluas jangkauan pengoperasian kendaraan sekitar 13%, yang dalam aplikasi logistik mungkin merupakan perbedaan antara kendaraan menyelesaikan rutenya dalam siklus baterai dan memerlukan penghentian pengisian daya yang tidak terjadwal. Efisiensi energi merupakan persyaratan spesifikasi kelas satu dalam pemilihan motor AGV, bukan pertimbangan sekunder.
Jenis Motor Utama yang Digunakan dalam Sistem Penggerak AGV
Motor Roda Gigi DC Tanpa Sikat (BLDC): Teknologi Penggerak AGV yang Dominan
Motor roda gigi DC tanpa sikat adalah teknologi motor penggerak yang paling disukai untuk sistem AGV modern. Motor BLDC menggantikan komutator mekanis dan rakitan sikat dari motor DC sikat tradisional dengan pergantian elektronik — pengontrol motor membaca posisi rotor (melalui sensor efek Hall atau umpan balik encoder) dan mengalihkan belitan stator dalam urutan yang benar untuk mempertahankan rotasi tanpa kontak fisik sikat. Pergantian elektronik inilah yang memberi motor BLDC keunggulan dibandingkan motor sikat dalam konteks AGV:
Tidak ada keausan sikat = tidak ada perawatan sikat. Pada motor DC yang disikat, sikat karbon yang menekan cincin komutator terus menerus aus selama pengoperasian. Pada siklus tugas tinggi – AGV beroperasi 20 jam per hari dalam operasi logistik tiga shift – interval penggantian sikat dapat dicapai dalam beberapa bulan, sehingga memerlukan waktu henti terjadwal dan tenaga kerja pengganti. Motor BLDC tidak memiliki sikat untuk dipakai; satu-satunya komponen yang aus adalah bantalan motor, yang masa pakainya diukur dalam ribuan jam. Untuk armada AGV yang beroperasi terus-menerus, menghilangkan perawatan sikat merupakan keuntungan biaya operasional dan waktu operasional yang tinggi.
Efisiensi lebih tinggi. Motor BLDC biasanya mencapai efisiensi listrik-ke-mekanis sebesar 90–95% pada titik operasi terukurnya, dibandingkan dengan 75–85% untuk motor DC brushed yang setara. Pada AGV bertenaga baterai, perbedaan efisiensi ini secara langsung berarti lebih banyak waktu kerja per siklus pengisian daya.
Kinerja termal yang lebih baik. Panas motor BLDC dihasilkan terutama pada belitan stator, yang bersentuhan langsung dengan rumah motor, sehingga pembuangan panas menjadi efisien. Motor yang disikat menghasilkan panas pada belitan dan titik kontak komutator/sikat, dan titik kontak sikat berada di bagian dalam motor, sehingga pembuangan panas menjadi kurang efektif. Motor BLDC mempertahankan siklus kerja berkelanjutan yang lebih tinggi tanpa terlalu panas.
Kontrol kecepatan yang tepat. Pergantian elektronik dengan encoder atau umpan balik sensor Hall memungkinkan kontrol kecepatan loop tertutup yang ketat pada rentang pengoperasian yang luas. Algoritme navigasi AGV bergantung pada umpan balik kecepatan roda yang akurat untuk estimasi posisi perhitungan mati antara perbaikan posisi absolut — motor BLDC dengan umpan balik encoder memberikan akurasi ini dengan andal.
Motor Roda Gigi DC yang Disikat: Hemat Biaya untuk Aplikasi AGV Tugas Rendah
Motor roda gigi DC yang disikat tetap digunakan dalam aplikasi AGV di mana siklus kerja pengoperasian lebih rendah (bukan operasi terus menerus 24/7), dengan persyaratan muatan yang sederhana, dan di mana biaya motor yang lebih rendah merupakan prioritas dalam platform AGV yang sensitif terhadap biaya. Dalam AGV yang dirancang untuk logistik internal tugas ringan - pengangkutan suku cadang kecil, pengiriman dokumen, dukungan lini produksi ringan - kontrol elektronik yang lebih sederhana diperlukan oleh motor DC yang disikat (tidak diperlukan pengontrol pergantian) dan biaya unit yang lebih rendah dapat membenarkan pemilihan mereka dibandingkan alternatif BLDC meskipun ada persyaratan pemeliharaan sikat.
Motor DC yang disikat juga memberikan torsi awal yang sangat tinggi — lebih tinggi dari motor BLDC berukuran setara dalam beberapa desain — yang dapat berguna untuk AGV yang memulai dengan beban di tanjakan. Namun, pengontrol motor BLDC modern dapat meniru perilaku torsi awal yang tinggi ini melalui strategi kontrol berorientasi lapangan, sehingga mengurangi keunggulan historis motor sikat di area ini.
Motor Roda Gigi Planet untuk Roda Penggerak AGV
Terlepas dari apakah elemen motor DC sikat atau tanpa sikat, roda penggerak AGV hampir secara universal menggunakan reduksi gigi planetary antara motor dan roda. Konfigurasi roda gigi planetary adalah jenis gearbox pilihan untuk aplikasi AGV karena beberapa alasan:
Roda gigi planet memberikan kepadatan torsi tertinggi — torsi keluaran tertinggi untuk diameter luar girboks tertentu — yang sangat penting dalam rakitan roda AGV di mana unit roda girboks motor lengkap harus sesuai dengan batasan dimensi yang ketat pada sasis kendaraan. Penyelarasan input/output koaksial dari gearbox planetary memungkinkan perakitan inline yang kompak: motor → gearbox planetary → roda penggerak, semuanya pada satu sumbu, tanpa offset yang dihasilkan oleh spur gear atau reduksi roda gigi cacing.
Gearbox planetary juga memberikan efisiensi tinggi (92–97% per tahap) dibandingkan dengan alternatif worm gear (biasanya 50–85% tergantung pada rasio dan sudut lead), yang penting dalam aplikasi AGV yang kritis terhadap efisiensi baterai. Motor penggerak AGV worm gear yang berjalan pada efisiensi girboks 70% kehilangan 30% masukan energi listrik motor menjadi panas di girboks saja — sebuah penalti yang tidak dapat diterima untuk kendaraan bertenaga baterai.
Parameter Spesifikasi Utama untuk Pemilihan Motor Penggerak AGV
| Parameter | Rentang Spesifikasi AGV Khas | Mengapa Itu Penting |
|---|---|---|
| Tegangan terukur | 24V / 36V / 48VDC | Harus sesuai dengan tegangan baterai AGV; tegangan yang lebih tinggi memungkinkan daya yang lebih tinggi pada arus yang lebih rendah, mengurangi kehilangan kabel dan suhu motor |
| Nilai daya | 50W – 1.000W per motor penggerak (tergantung kendaraan dan muatan) | Harus cukup untuk mempercepat kendaraan yang dimuati pada tanjakan paling curam di lingkungan pengoperasian; kekurangan tenaga menyebabkan kelebihan beban termal motor di tanjakan |
| Kecepatan keluaran pada kemudi | 50–300 RPM (poros roda, setelah pengurangan gigi) | Menentukan kecepatan perjalanan kendaraan; diameter roda dan kecepatan target AGV menentukan RPM poros keluaran yang diperlukan dan oleh karena itu rasio roda gigi yang diperlukan |
| Torsi keluaran berkelanjutan | 5–200 Nm per motor penggerak (tergantung muatan dan kemiringan) | Harus melebihi torsi yang diperlukan untuk menggerakkan AGV yang terisi penuh pada kemiringan maksimum pada kecepatan terukur; terapkan 2× faktor keamanan untuk margin beban kejut |
| Torsi puncak | 2×–3× torsi terus menerus | Diperlukan untuk akselerasi dari posisi diam pada beban penuh; motor dan pengontrol harus mempertahankan torsi puncak selama tanjakan akselerasi tanpa panas berlebih atau memicu proteksi arus lebih |
| Resolusi pembuat enkode | 100–4096 PPR (denyut per putaran pada poros motor) | Menentukan akurasi odometri untuk navigasi perhitungan mati; resolusi encoder yang lebih tinggi meningkatkan estimasi posisi antara perbaikan posisi absolut dari sensor navigasi |
| Efisiensi | ≥ 85% keseluruhan (kotak roda gigi motor) pada titik pengoperasian terukur | Secara langsung menentukan waktu pengoperasian baterai; Planetary BLDC mencapai efisiensi gabungan 90%; lebih memilih ini daripada roda gigi cacing yang disikat (gabungan 60–70%) |
| Peringkat IP | IP54 minimum untuk logistik dalam ruangan umum; IP65 untuk lingkungan basah atau berdebu | Motor AGV terkena kontaminan di lantai; perlindungan masuknya yang tidak memadai menyebabkan kegagalan bantalan dan belitan dini akibat debu dan kelembapan |
| Siklus tugas | S1 berkelanjutan untuk operasi 24/7; S3 intermiten untuk satu shift | Peringkat termal motor harus sesuai dengan pola operasional; motor yang diberi peringkat untuk tugas intermiten S3 akan menjadi terlalu panas dalam aplikasi S1 AGV yang berkelanjutan |
Cara Menghitung Torsi Motor Penggerak AGV yang Dibutuhkan
Torsi yang diperlukan untuk menggerakkan AGV dengan kecepatan konstan pada permukaan datar harus mengatasi hambatan gelinding; di tanjakan, gravitasi menambah komponen ketahanan tanjakan. Perhitungan untuk AGV roda dua pada umumnya:
Berat total kendaraan: W = (muatan maksimum berat tara AGV) × g [Newton]
Kekuatan resistensi bergulir: F_rolling = W × μ_r, dengan μ_r adalah koefisien hambatan gelinding (biasanya 0,01–0,02 untuk roda karet pada beton halus; 0,02–0,05 untuk lantai lunak atau permukaan kasar)
Gaya tahanan permukaan (untuk tanjakan): F_grade = W × sin(θ), dimana θ adalah sudut kemiringan (untuk kemiringan 5%, θ ≈ 2.86°, sin(θ) ≈ 0.05)
Total kekuatan penggerak: F_total = F_bergulir F_grade
Torsi yang diperlukan pada roda penggerak (per motor, dengan asumsi dua motor penggerak): T_wheel = (F_total / 2) × r_wheel, dimana r_wheel adalah radius roda penggerak dalam meter
Torsi motor yang dibutuhkan: T_motor = T_wheel / (i × η), dimana i adalah rasio reduksi gigi, dan η adalah efisiensi gearbox
Misalnya, AGV dengan bobot muatan total 500 kg, roda penggerak berdiameter 150 mm, pada grade 3%, dengan gearbox planetary 25:1 pada efisiensi 0,95:
- L = 500 × 9,81 = 4,905 N
- F_bergulir = 4,905 × 0,015 = 73,6 N
- F_grade = 4,905 × 0,03 = 147,2 N
- F_total = 220,8N; per motor = 110,4 N
- T_roda = 110,4 × 0,075 = 8,28 Nm
- T_motor = 8,28 / (25 × 0,95) = torsi kontinu terukur 0,35 Nm
Tambahkan 2× faktor keamanan untuk torsi akselerasi: kebutuhan torsi puncak motor ≈ 0,70 Nm. Motor roda gigi planetary BLDC dengan torsi puncak ≥ 0,70 Nm pada 48V dengan rasio 25:1 memenuhi persyaratan ini. Peringkat torsi kontinu harus diverifikasi terhadap torsi kontinu yang diperlukan (0,35 Nm pada muatan penuh di tanjakan) dengan margin termal yang memadai.
Pertanyaan yang Sering Diajukan
Bagaimana konfigurasi kemudi AGV mempengaruhi pemilihan motor?
AGV menggunakan beberapa konfigurasi kemudi, masing-masing dengan kebutuhan motor yang berbeda. Penggerak diferensial (dua roda penggerak independen, tanpa roda kemudi) menciptakan belokan dengan menjalankan dua motor penggerak pada kecepatan berbeda — hal ini mengharuskan kedua motor memiliki karakteristik torsi kecepatan yang sangat cocok dan dikendalikan oleh driver motor terkoordinasi yang dapat memerintahkan kecepatan diferensial pada kedua roda secara bersamaan. Kemudi roda tiga (satu roda penggerak yang dikemudikan di depan, dua roda belakang pasif) menggunakan motor penggerak tunggal dengan aktuator kemudi terpisah — pemilihan motor sangatlah mudah, namun integrasi aktuator kemudi harus dipertimbangkan. Penggerak segala arah (roda mecanum atau omni di setiap sudut) menggunakan empat motor yang dikontrol secara individual dan memungkinkan gerakan lateral dan diagonal — pengontrol motor harus menangani koordinasi empat saluran, dan motor harus memiliki karakteristik pencocokan kecepatan yang sangat baik di seluruh jangkauan pengoperasiannya.
Jenis encoder apa yang direkomendasikan untuk motor penggerak AGV?
Encoder inkremental (output A/B kuadratur) adalah jenis yang paling umum untuk odometri motor penggerak AGV — encoder ini memberikan jumlah pulsa per putaran yang diubah oleh pengontrol navigasi menjadi jarak tempuh dan kecepatan roda. Encoder absolut kadang-kadang digunakan dalam aplikasi yang memerlukan pengontrol untuk mengetahui posisi tanpa homing setelah dinyalakan, tetapi untuk odometri (pengukuran jarak), encoder inkremental adalah standarnya. Resolusi 500–1000 PPR pada poros motor biasanya cukup untuk akurasi odometri yang baik dengan rasio reduksi roda gigi planetary standar. Resolusi yang lebih tinggi (PPR 2000–4096) meningkatkan odometri pada sistem rasio rendah di mana poros roda menggerakkan sebagian besar putaran per putaran motor.
Bisakah motor penggerak AGV digunakan dengan pengereman regeneratif?
Ya — Pengontrol motor BLDC dalam aplikasi AGV biasanya mendukung pengereman regeneratif, di mana motor bertindak sebagai generator selama perlambatan, mengubah energi kinetik kembali menjadi energi listrik yang mengisi ulang baterai. Pengereman regeneratif mengurangi konsumsi baterai (khususnya pada rute AGV stop-and-go yang sering mengalami deselerasi), mengurangi keausan rem, dan memungkinkan deselerasi lebih cepat tanpa panas rem mekanis. Efisiensi pemulihan energi dari pengereman regeneratif dalam aplikasi AGV pada umumnya adalah 15–30% dari energi yang digunakan untuk akselerasi, yang berarti dalam operasi rute pendek frekuensi tinggi. Kemampuan regeneratif mengharuskan pengontrol motor mendukung aliran arus dua arah dan sistem manajemen baterai menerima arus pengisian ulang tanpa memasuki perlindungan tegangan lebih.
Motor Penggerak AGV dari Manufaktur Cerdas Zhejiang Saiya
Zhejiang Saiya Cerdas Manufacturing Co, Ltd. , Deqing, Zhejiang, memproduksi motor roda gigi planetary BLDC, motor roda gigi planetary DC yang disikat, dan rakitan motor penggerak AGV lengkap untuk aplikasi kendaraan berpemandu otonom. Rangkaian produk AGV mencakup unit motor penggerak dengan encoder terintegrasi pada voltase baterai nominal 24V, 36V, dan 48V, dalam ukuran bingkai dari diameter 32mm hingga 82mm, dengan rasio reduksi roda gigi planetary dari 5:1 hingga lebih dari 500:1, mencakup kelas muatan mulai dari AGV pengangkutan komponen kecil tugas ringan hingga platform penanganan material tugas berat. Spesifikasi motor AGV khusus — voltase, rasio, resolusi encoder, pemasangan, peringkat IP, dan konektor — tersedia melalui layanan pengembangan OEM/ODM perusahaan.
Hubungi kami dengan spesifikasi AGV Anda — berat kendaraan, muatan, kecepatan maksimum, voltase baterai, diameter roda, dan lingkungan pengoperasian — untuk menerima rekomendasi dan penawaran motor penggerak.
Produk Terkait: Produk Proyek AGV | Brushless DC Gear Motors | Motor Roda Gigi Planet | Gearbox Planetary Presisi | Motor Roda Gigi DC yang Disikat
Produk terkait
-

Motor gear AC induksi 6W ini adalah motor kecil yang efisien, kompak, dan andal yang cocok untuk berbagai aplikasi industri dan rumah tangga. Bingkai motor 60mm x 60mm sehingga mudah dipasang di li...
Lihat detail -

Motor 6W Brush DC Gbear dirancang untuk efisiensi dan fleksibilitas, cocok untuk berbagai aplikasi. Dengan ukuran bingkai yang ringkas 60mm x 60mm, cocok dengan ruang yang sangat rapat. Motor berop...
Lihat detail -

Motor DC Gear 10W Brush menawarkan kinerja tinggi dan kemampuan beradaptasi, untuk berbagai aplikasi industri dan hobi. Dengan ukuran bingkai 60mm x 60mm, motor ini dirancang agar pas dengan ruang ...
Lihat detail -

Motor gear sikat 24V adalah motor serba guna dan efisien yang dirancang untuk berbagai aplikasi. Dengan dimensi mulai dari 60mm x 60mm hingga 104mm x 104mm, motor ini dapat masuk ke berbagai ukuran...
Lihat detail -

Motor gear planet 32mm yang disikat adalah solusi yang ringkas dan efisien yang dirancang untuk berbagai aplikasi yang membutuhkan torsi tinggi dan kontrol yang tepat. Dengan diameter 32mm, motor i...
Lihat detail -

Motor gear planetary 42mm adalah komponen yang serba guna dan efisien banyak digunakan dalam berbagai aplikasi yang membutuhkan torsi dan kontrol kecepatan yang tepat. Dengan pengenal arus mulai da...
Lihat detail -

Motor gear planet sikat 32mm adalah solusi berkinerja tinggi, kompak yang ideal untuk aplikasi yang membutuhkan efisiensi dan keandalan. Beroperasi pada tegangan pengenal 24V dan mengkonsumsi daya ...
Lihat detail -

Motor planet tanpa sikat 42mm adalah produk motor efisiensi tinggi yang banyak digunakan dalam berbagai skenario yang membutuhkan transmisi presisi. Arus pengenal motor ini adalah 1,3A dan torsi ya...
Lihat detail -

Gearbox SPE Series, rentang ukuran flensa dengan 40, 60, 80, 120, dan 160 model, dirancang untuk memberikan solusi transmisi daya yang efisien dan kuat. Gearbox ini memiliki flensa output bundar, m...
Lihat detail -

Seri SPF dengan flensa output persegi, dimensi akomodatif dari 40mm hingga 160mm. Flensa ini direkayasa untuk unggul dalam berbagai aplikasi industri, menawarkan kinerja yang andal di seluruh spekt...
Lihat detail -

Motor gear planet 52mm yang disikat adalah solusi yang ringkas dan efisien yang dirancang untuk berbagai aplikasi yang membutuhkan torsi tinggi dan kontrol yang tepat. Dengan diameter 52mm, motor i...
Lihat detail -

Motor gear planetary 62mm adalah komponen yang serba guna dan efisien banyak digunakan dalam berbagai aplikasi yang membutuhkan torsi dan kontrol kecepatan yang tepat. Dengan pengenal arus mulai da...
Lihat detail
Detail kontak
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Kantor: Hangzhou Saiya Transmisson Equipment Co., Ltd
- Office Address: Kamar 2201, Bangunan Wanyin, Kota Hangzhou, Provinsi Zhejiang
- Pabrik: Zhejiang Saiya Intelligent Manufacturing Co., Ltd.
- Factory Address: Bangunan No.35, Taman Industri Zhongnan Teknik Yunhe Zhigu, Kota Xinan, Kabupaten Deqing, Kota Huzhou, Zhejiang, Cina
Tautan cepat
PRODUK
Jika Anda tertarik
Dalam produk kami,
Silakan berkonsultasi dengan kami
Copyright © Zhejiang Saiya Intelligent Manufacturing Co., Ltd. All Rights Reserved.
Pemasok Motor Pengurangan Gigi Kustom
